Time series simulator (ARMA)
An important part of Econometrics focuses on analyzing time series. We can apply time series analysis to almost any context, the only requirement is that we have similar data along different periods.
To analyze and understand time series, it is sometimes useful to simulate data. In its simplest form, we can classify them into 4 categories: white noise, autoregressive, moving average, and a combination of the last two, called—unsurprisingly—autoregressive moving average.
Even though many programs that can already perform these simulations out-of-the-box (STATA, Matlab, Python modules, etc.), it is still interesting to develop them on our own. With this aim in mind, I developed a simple Python class that can simulate the series described.
White noise process
A white noise process is as simple as it can get: it is just random numbers (which are sometimes called “innovations”). As a curious side note, the term “white noise” is not original from time series. It was first used to describe a sound that had all frequencies together1.
For our context, we will define a “white noise” as:
\[ y_{t} = \epsilon_{t} \]
Where satisfies the following properties:
\[
\begin{gather}
\tag{1}\label{eq:wn_1}
E[\epsilon_{t}] = E[\epsilon_{t}|\epsilon_{t-1}, \epsilon_{t-2}, …] = 0\\
\tag{2}\label{eq:wn_2}
V[\epsilon_{t}] = V[\epsilon_{t}|\epsilon_{t-1}, \epsilon_{t-2}, …] = \sigma^{2}\\
\tag{3}\label{eq:wn_3}
E[\epsilon_{t}\epsilon_{t-j}] = E[\epsilon_{t} \epsilon_{t-j}|\epsilon_{t-1}, \epsilon_{t-2}, …] = 0 \quad \text{with } j \ne{0}
\end{gather}
\]
Equation \eqref{eq:wn_1} guarantees that the process has a conditional mean of zero. Equation \eqref{eq:wn_2} that the process has a constant variance (homoscedastic), and equation \eqref{eq:wn_3} that errors are uncorrelated. It is worth noticing that no distribution is imposed on , but to keep things simple, we will use a normal distribution with a variance of . Here is that definition written in code:
import numpy as np # For clearness, imports will only be shown in this snippet.
def generate_wn(n, sigma=1):
return np.random.normal(0, sigma, size=n) # The first parameter makes E[e_t] = 0.Moving average process
In simple words, a moving average process is just a weighted combination of values coming from a white noise process. Mathematically, we define a moving average process of lags (also called ) as:
\[ y_{t} = \mu + \epsilon_{t} + \theta_{1}\epsilon_{t-1} + \theta_{2}\epsilon_{t-2} + … + \theta_{q}\epsilon_{t-q} \]
Here, each tells us how much the series “remembers” each .
We add the parameter to allow the process to have a non-zero mean.
To simulate a moving average process we need to:
- Generate a white noise series.
- Weight and sum the values of the white noise process.
- Remove the first elements of the series ( being the number of coefficients used).
Here are the steps listed above, now written in code:
def generate_ma(n, thetas, mu, sigma=1):
q = len(thetas)
adj_n = n + q # We add q values because at the beginning we have no thetas available.
e_series = ARMA.generate_wn(adj_n, sigma) # Generating a white noise.
ma = []
for i in range(1, adj_n):
visible_thetas = thetas[0:min(q, i)] # At first, we only "see" some of the thetas.
visible_e_series = e_series[i - min(q, i):i] # The same happens to the white noise.
reversed_thetas = visible_thetas[::-1]
try: # Getting e_t if we can.
e_t = visible_e_series[-1]
except IndexError:
e_t = 0
# Main equation.
ma_t = mu + e_t + np.dot(reversed_thetas, visible_e_series)
ma.append(ma_t)
ma = ma[max(q-1, 0):] # Dropping the first values that did not use all the thetas.
return maAutoregressive process
An autoregressive process consists in starting with an arbitrary number and using past results to generate iteratively future values. The parameters of this function determine how much the series “remembers” itself. Mathematically, we define an autoregressive process of lags (also called ) as:
\[ y_{t} = \phi_{1} y_{t-1} + \phi_{2} y_{t-2} + … + \phi_{p} y_{t-p} + \epsilon_{t} \]
Here, each tells us how much the series weights its past values, and is a simple random number. To simulate a moving average process, we need:
- Start with an arbitrary value for .
- Generate a white noise process.
- Determine each new using and .
- Remove the first elements of the series ( being the number of coefficients used).
Here are the steps listed above, now written in code:
def generate_ar(n, phis, sigma=1):
p = len(phis)
adj_n = n + p # We add q values because at the beginning we have no phis available.
e_series = ARMA.generate_wn(adj_n, sigma) # Generating a white noise.
ar = [e_series[0]] # We start the series with a random value
for i in range(1, adj_n):
visible_phis = phis[0:min(p, i)] # At first, we only "see" some of the phis.
visible_series = ar[i - min(p, i):i] # The same happens to the white noise.
reversed_phis = visible_phis[::-1]
# Main equation.
ar_t = e_series[i] + np.dot(reversed_phis, visible_series)
ar.append(ar_t)
ar = ar[p:] # Dropping the first values that did not use all the phis.
return arAutoregressive moving average process
As the name suggests, this process is just a combination of the last two. This means that it has “memory” over its past values and also over the innovations. Mathematically, we define an autoregressive moving average process of lags in , and lags in (noted as ) as:
\[ y_{t} = \mu + \phi_{1} y_{t-1} + \phi_{2} y_{t-2} + … + \phi_{p} y_{t-p} + \epsilon_{t} + \theta_{1}\epsilon_{t-1} + \theta_{2}\epsilon_{t-2} + … + \theta_{q}\epsilon_{t-q} \]
To simulate this process, we just need to sum each sub-process in each instance:
def generate_arma(n, phis, thetas, mu, sigma=1):
p = len(phis)
q = len(thetas)
adj_n = n + max(p, q) # We use max to make sure we cover the lack of coefficients.
e_series = ARMA.generate_wn(adj_n) # Base white noise.
arma = [e_series[0]] # We start the series with a random value (same as AR).
for i in range(1, adj_n):
visible_phis = phis[0:min(p, i)]
visible_thetas = thetas[0:min(q, i)]
reversed_phis = visible_phis[::-1]
reversed_thetas = visible_thetas[::-1]
visible_series = arma[i - min(p, i):i]
visible_e_series = e_series[i - min(q, i):i]
try: # Getting e_t if we can.
e_t = visible_e_series[-1]
except IndexError:
e_t = 0
# Main equation.
ar_t = + np.dot(reversed_phis, visible_series)
ma_t = mu + e_t + np.dot(reversed_thetas, visible_e_series)
arma_t = ar_t + ma_t
arma.append(arma_t)
arma = arma[max(p, q):] # Dropping the first values that did not use all the phis or thetas.
return armaPlotting the series
Finally, we can visualize the series created:
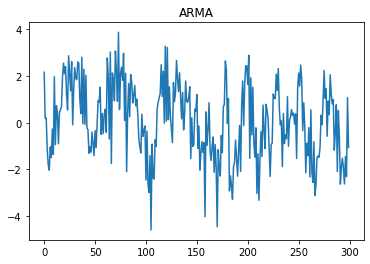
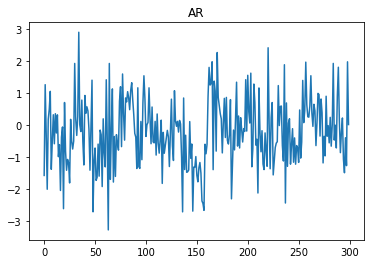
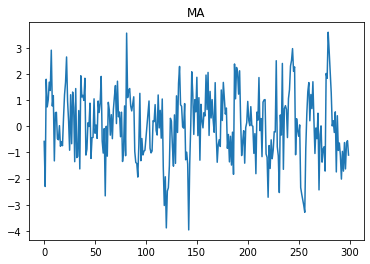
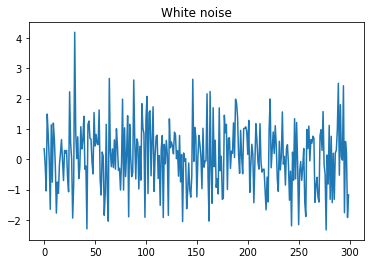
What is interesting is that it is difficult to distinguish each process just by looking at the plot. To visually differentiate the series, we can resort to a visual tool called correlograms.
You can find all the code here and play with an online Jupyter Notebook here
.
You can also find a Matlab version of the code here .
-
“Inside the plane … we hear all frequencies added together at once, producing a noise which is to sound what white light is to light.” (L. D. Carson, W. R. Miles & S. S. Stevens, “Vision, Hearing and Aeronautical Design,” Scientific Monthly, 56, (1943), 446-451). ↩